Transit to Crozet 6/12/2005 – 7/12/2005
WELCOME TO THE CROZET iLANDERS!
Throwing a very expensive piece of equipment
overboard to the depths of the ocean and hoping it will come
back doesn’t sound particularly sensible, however for
the Oceanlab team it’s the method by which they study
the animals living on the deep sea floor.
Oceanlab use landers to photograph deep-sea
scavenging animals in their natural environment by attracting
them to a camera using bait. Landers are basically metal frames
onto which you can attach scientific equipment. They are weighted
down with ballast, causing them to sink to the seafloor, when
the lander has finished carrying out a series of pre-programmed
tasks, we send an acoustic (sound) signal from the ship telling
the lander to release the ballast, and then floats return
the lander to the surface. A very large flag, radio and strobe
help us to locate the lander on the surface.
During the Crozet cruise Oceanlab are going
to be deploying 2 landers to 4300 m at each study site; the
RObust BIOdiversity lander (ROBIO), and the Fish Respirometry
lander (FRESP).
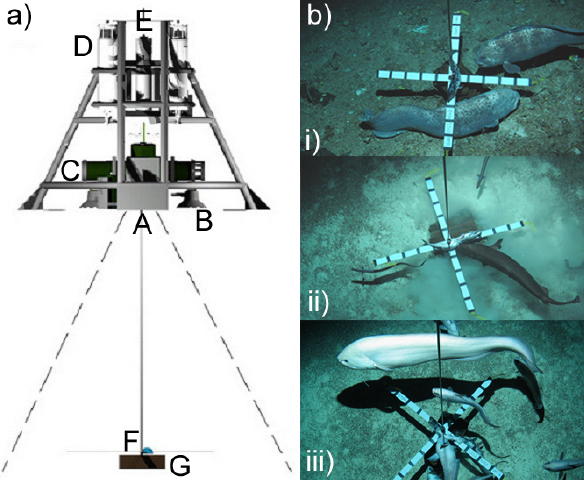
a) ROBIO lander; A, digital camera, B,
flash unit, C, power supply, D, acoustic release, E, current
meter, F, bait, and G, reference cross (ruler for measuring
fish).
b) Fish species photographed
by ROBIO; i) Wolfish, Anarhchas denticulatus, ii) Portuguese
dogfish, Centroscymnus coelolepis, iii) Large male cusk eel,
Spectrunculus sp.
The ROBIO is a small lander, which carries a
digital camera (yes, scientists do keep up with the times!),
a flash unit to provide light, a power supply, two acoustic
releases to release the ballast and a current meter to measure
how the speed and direction of water currents close to the
seafloor. Bait attracts scavenging fish to within the field
of view of the camera, and images are taken every 90 seconds
for periods up to 12 hours. The photos that Oceanlab get back
allow them to determine which scavenging fish are present
in different regions of the world’s oceans, how big
they are and to estimate the number of fish present.
FRESP is a much larger lander, working on the
same principle as the ROBIO, it attracts scavenging fish into
the view of a camera using bait, but in addition it traps
scavenging fish using a large drop down box. Once trapped
an oxygen sensor measures their respiration (how much oxygen
they use) over time. The videos taken allow for the fish’s
behaviour and activity to be studied, and compared to the
change in oxygen inside the trap. Normally these measurements
could not be taken on the surface because the fish die due
to the extreme change in pressure and temperature between
the ocean depths, and surface pressure.

a) FRESP lander; A, fish trap, B, digital
video camera, C, power supply, D, acoustic releases, E, bait,
and F, oxygen sensor.
b) Abyssal grenadier (Coryphaenoides armatus) feeding at the
bait with the trap up. c) Specimen of the abyssal grenadier
inside the dropped fish trap.
Landers provide an efficient, non-destructive
and complimentary method with which to study the vast expanse
of the deep-sea floor. The information from lander deployments
conducted all over the world allow us to draw conclusions
as to the distribution and abundance of deep marine scavengers
for future reference, protection and management.
The Oceanlab team consists of Dr. Phil Bagley,
engineer, Dr. Alan Jamieson, engineer, Dr. Ben Wigham, marine
biologist, and Nikki King, marine biologist.
 |

